Difference between revisions of "Cascada 2.0"
(Created page with " <syntaxhighlight lang="cpp" line='line'> #include "CONFIG.h" →INSTRUCTIONS * be sure to modify FLAGS for HAYpROGS and HAYtIMRS: /*CUSTOM CODE Transformer D8 activated w...") |
|||
| Line 152: | Line 152: | ||
</syntaxhighlight> | </syntaxhighlight> | ||
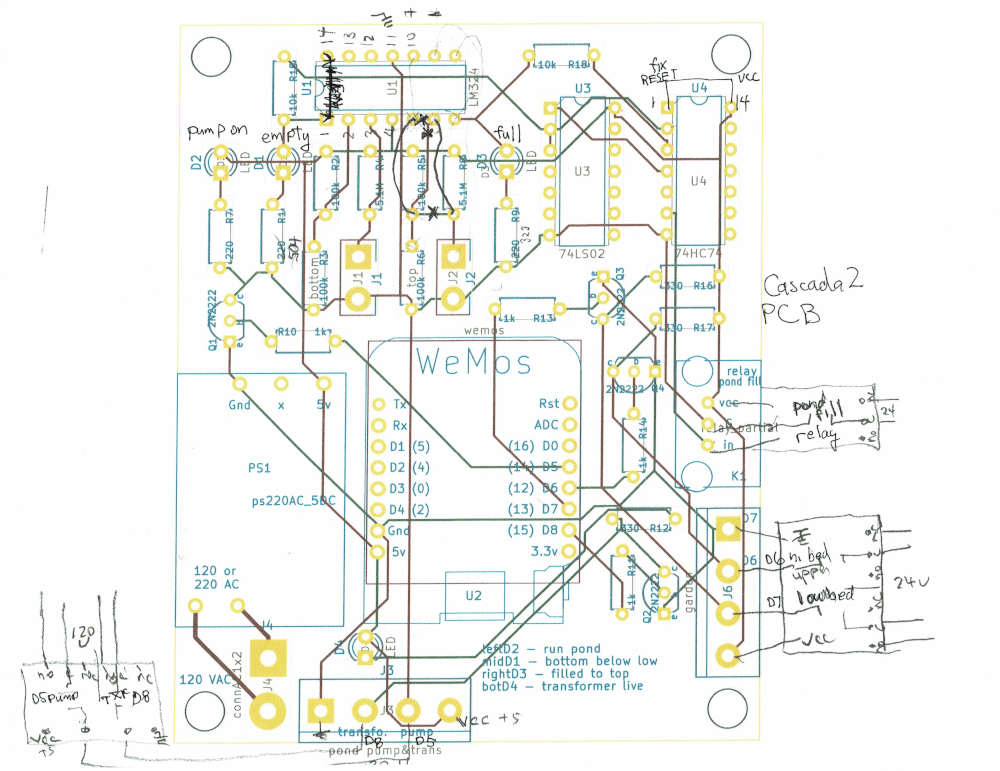
https://sitebuilt.net/files/info/wiki/tech/Cascada2pcb.png | |||
Revision as of 16:07, 10 May 2020
<syntaxhighlight lang="cpp" line='line'>
- include "CONFIG.h"
/*INSTRUCTIONS
- be sure to modify FLAGS for HAYpROGS and HAYtIMRS
- /
/*CUSTOM CODE Transformer D8 activated when either D5,D6 or D7 hi srs.ti[0] (sr 0) onoff for D5 srs.ti[1] (sr 1) onoff for D6 srs.ti[2] (sr 2) onoff for D7 (see srs.ti_t and prgs.prg_t) otherwise make some DUMMY custom function void customInit(){
if(0==1){
int dog =3;
}
}; void customLoop() {
if(0==1){
int dog =3;
}
};
- /
void customInit(){
pinMode(D8, OUTPUT); digitalWrite(D8, HIGH);
} void customLoop(){
int bef = digitalRead(D8);
if(srs.ti[0].onoff==1 || srs.ti[1].onoff==1 || srs.ti[2].onoff==1){
digitalWrite(D8, HIGH);
}else{
digitalWrite(D8, LOW);
}
int aft = digitalRead(D8);
if(aft != bef){
Serial.print("D8 is ");
Serial.println(aft);
}
}
/*DESCRIPTION
Cascada
Pond D5 OUT when on acivates lohi water circuit+relay
and pond pumps relay (120V)
Garden D6 & D7 OUT irrigation activate (24V) Transformer D8 activated when either D5,D6 or D7 hi hay NO sensors connected to esp8266 CONFIG_CYURD116cascada running on espboth/secsti has CUSTOM CODE
- /
/*LOCID 10-12ParleyVale
- /
/*SERVER
dev extern device variables*/
char devid[9]="CYURD116";
char owner[254]="xxxx";
char pwd[24]="xxxx";
char mqtt_server[60]="sitebuilt.net";
char mqtt_port[6]="1884";
/*dev*/
/*SPECS CONFIG extern const device variables INCOMING const mqtt topics*/ const topics_t TPC {
5,
{"devtime", "cmd", "prg", "req", "set"}
}; /*PORTS for INPUT*/ const portsin_t inpo {
0, //DS18b20a 0, //DS18b20b 0,//dht11 0, //ANALOG 0, //SPIdo 0, //SPIcs 0};//shares i2c D2 and D1
/*SE constant declarations*/ const sen_t SE {
0,//number of different sensor types
0,//number of sensors(numsens)
{}
}; /*------------------------------------------------------ CONFIG extern structures (initial values, changeable)*/ /*srs extern data structure initalization state of relays and sensors */ srs_t srs {
3,//numsr
0,//sumse
{},
0,//numcs
{},
3,//numti
{ //{sr,onoff,rec,isnew}
{0,0,1,0},{1,0,1,0},{2,0,1,0}
}
}; /*prgs extern data structure initalization*/ prgs_t prgs{
3,//numprgs
{ //sr,aid,ev,numdata,prg[[]],port,hms
{0,255,1,1,Template:0,0,0,D5,1506}, //pond
{1,255,1,1,Template:0,0,0,D6,1504}, //hi_bed
{2,255,1,1,Template:0,0,0,D7,1503} //lo_bed
}
}; /*flags extern data structure*/ flags_t f {//MODIFY HAYpROG and HAStIMR
0,//aUTOMA
0,//fORCErESET
5,//cREMENT
7,//HAStIMR 00000111 =1+2+4=7
0,//IStIMERoN
7,//HAYpROG 00000111 =1+2+4=7
1023,//HAYsTATEcNG
0,//CKaLARM
0,//ISrELAYoN
{0,0,0,0,0,0,0,0,0,0}//tIMElEFT[10]
};
// nxtalarr_t nxtal { // 0,//num // {//sr,aid,hms (h*60+m)*20+sr // {0,255,29000}, // {1,255,29000}, // {2,255,29000}, // {3,255,29000}, // {99,255,29001}, // {99,255,29002}, // {99,255,29006}, // {99,255,29004}, // {99,255,29000}, // {99,255,29000} // } // };
// const srpos_t outpos {
// 3, //numpos
// {{2,D0}, {7,D3}, {8,D4}} //pod.sr,pod.portnum
// };
</syntaxhighlight>